In [1]:
from IPython.display import Image
CNTK 102: Feed Forward Network with Simulated Data¶
The purpose of this tutorial is to familiarize you with quickly combining components from the CNTK python library to perform a classification task. You may skip Introduction section, if you have already completed the Logistic Regression tutorial or are familiar with machine learning.
Introduction¶
Problem (recap from CNTK 101):
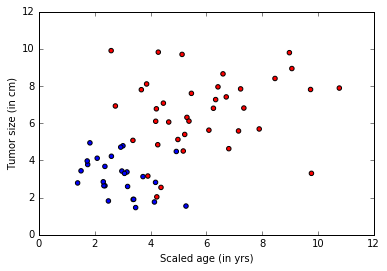
A cancer hospital has provided data and wants us to determine if a patient has a fatal malignant cancer vs. a benign growth. This is known as a classification problem. To help classify each patient, we are given their age and the size of the tumor. Intuitively, one can imagine that younger patients and/or patient with small tumor size are less likely to have malignant cancer. The data set simulates this application where the each observation is a patient represented as a dot where red color indicates malignant and blue indicates a benign disease. Note: This is a toy example for learning, in real life there are large number of features from different tests/examination sources and doctors’ experience that play into the diagnosis/treatment decision for a patient.
In [2]:
# Figure 1
Image(url="https://www.cntk.ai/jup/cancer_data_plot.jpg", width=400, height=400)
Out[2]:

Goal: Our goal is to learn a classifier that classifies any patient into either benign or malignant category given two features (age, tumor size).
In CNTK 101 tutorial, we learnt a linear classifier using Logistic Regression which misclassified some data points. Often in real world problems, linear classifiers cannot accurately model the data in situations where there is little to no knowledge of how to construct good features. This often results in accuracy limitations and requires models that have more complex decision boundaries. In this tutorial, we will combine multiple linear units (from the CNTK 101 tutorial - Logistic Regression) to a non-linear classifier. The other aspect of such classifiers where the feature encoders are automatically learnt from the data will be covered in later tutorials.
Approach: Any learning algorithm has typically five stages. These are Data reading, Data preprocessing, Creating a model, Learning the model parameters, and Evaluating (a.k.a. testing/prediction) the model.
We keep everything same as CNTK 101 except for the third (Model creation) step where we use a feed forward network instead.
Feed forward network model¶
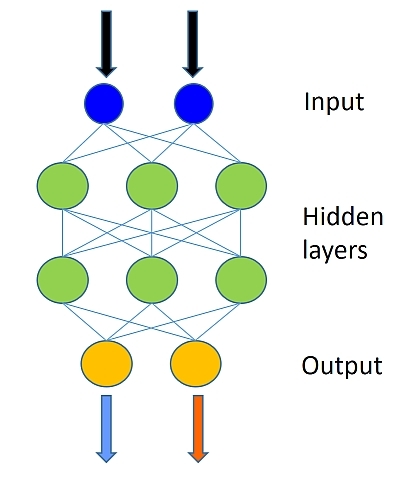
The data set used is similar to the one used in the Logistic Regression tutorial. The model combines multiple logistic classifiers to be able to classify data when the decision boundary needed to properly categorize the data is more complex than a simple linear model (like Logistic Regression). The figure below illustrates the general shape of the network.
In [3]:
# Figure 2
Image(url="https://upload.wikimedia.org/wikipedia/en/5/54/Feed_forward_neural_net.gif", width=200, height=200)
Out[3]:

A feedforward neural network is an artificial neural network where connections between the units do not form a cycle. The feedforward neural network was the first and simplest type of artificial neural network devised. In this network, the information moves in only one direction, forward, from the input nodes, through the hidden nodes (if any) and to the output nodes. There are no cycles or loops in the network
In this tutorial, we will go through the different steps needed to complete the five steps for training and testing a model on the toy data.
In [4]:
# Import the relevant components
from __future__ import print_function # Use a function definition from future version (say 3.x from 2.7 interpreter)
import matplotlib.pyplot as plt
%matplotlib inline
import numpy as np
import sys
import os
import cntk as C
import cntk.tests.test_utils
cntk.tests.test_utils.set_device_from_pytest_env() # (only needed for our build system)
C.cntk_py.set_fixed_random_seed(1) # fix a random seed for CNTK components
Data Generation¶
This section can be skipped (next section titled Model Creation) if you have gone through CNTK 101.
Let us generate some synthetic data emulating the cancer example using
numpy library. We have two features (represented in two-dimensions)
each either being to one of the two classes (benign:blue dot or
malignant:red dot).
In our example, each observation in the training data has a label (blue or red) corresponding to each observation (set of features - age and size). In this example, we have two classes represented by labels 0 or 1, thus a binary classification task.
In [6]:
# Ensure we always get the same amount of randomness
np.random.seed(0)
# Define the data dimensions
input_dim = 2
num_output_classes = 2
Input and Labels¶
In this tutorial we are generating synthetic data using numpy
library. In real world problems, one would use a reader, that would read
feature values (features: age and tumor size) corresponding to
each observation (patient). Note, each observation can reside in a
higher dimension space (when more features are available) and will be
represented as a tensor in CNTK. More advanced tutorials shall introduce
the handling of high dimensional data.
In [7]:
# Helper function to generate a random data sample
def generate_random_data_sample(sample_size, feature_dim, num_classes):
# Create synthetic data using NumPy.
Y = np.random.randint(size=(sample_size, 1), low=0, high=num_classes)
# Make sure that the data is separable
X = (np.random.randn(sample_size, feature_dim)+3) * (Y+1)
X = X.astype(np.float32)
# converting class 0 into the vector "1 0 0",
# class 1 into vector "0 1 0", ...
class_ind = [Y==class_number for class_number in range(num_classes)]
Y = np.asarray(np.hstack(class_ind), dtype=np.float32)
return X, Y
In [8]:
# Create the input variables denoting the features and the label data. Note: the input
# does not need additional info on number of observations (Samples) since CNTK first create only
# the network tooplogy first
mysamplesize = 64
features, labels = generate_random_data_sample(mysamplesize, input_dim, num_output_classes)
Let us visualize the input data.
Caution: If the import of matplotlib.pyplot fails, please run
conda install matplotlib which will fix the pyplot version
dependencies
In [9]:
# Plot the data
import matplotlib.pyplot as plt
%matplotlib inline
# given this is a 2 class
colors = ['r' if l == 0 else 'b' for l in labels[:,0]]
plt.scatter(features[:,0], features[:,1], c=colors)
plt.xlabel("Scaled age (in yrs)")
plt.ylabel("Tumor size (in cm)")
plt.show()
Model Creation¶
Our feed forward network will be relatively simple with 2 hidden layers
(num_hidden_layers) with each layer having 50 hidden nodes
(hidden_layers_dim).
In [10]:
# Figure 3
Image(url="http://cntk.ai/jup/feedforward_network.jpg", width=200, height=200)
Out[10]:
The number of green nodes (refer to picture above) in each hidden layer is set to 50 in the example and the number of hidden layers (refer to the number of layers of green nodes) is 2. Fill in the following values: - num_hidden_layers - hidden_layers_dim
Note: In this illustration, we have not shown the bias node (introduced in the logistic regression tutorial). Each hidden layer would have a bias node.
In [11]:
num_hidden_layers = 2
hidden_layers_dim = 50
Network input and output: - input variable (a key CNTK concept): >An
input variable is a container in which we fill different
observations (data point or sample, equivalent to a blue/red dot in our
example) during model learning (a.k.a.training) and model evaluation
(a.k.a. testing). Thus, the shape of the input must match the shape
of the data that will be provided. For example, when data are images
each of height 10 pixels and width 5 pixels, the input feature dimension
will be two (representing image height and width). Similarly, in our
examples the dimensions are age and tumor size, thus input_dim = 2).
More on data and their dimensions to appear in separate tutorials.
Question What is the input dimension of your chosen model? This is fundamental to our understanding of variables in a network or model representation in CNTK.
In [12]:
# The input variable (representing 1 observation, in our example of age and size) x, which
# in this case has a dimension of 2.
#
# The label variable has a dimensionality equal to the number of output classes in our case 2.
input = C.input_variable(input_dim)
label = C.input_variable(num_output_classes)
Feed forward network setup¶
Let us define the feedforward network one step at a time. The first
layer takes an input feature vector (x) with dimensions
input_dim, say m, and emits the output a.k.a. evidence
(first hidden layer z1 with dimension
hidden_layer_dim, say n). Each feature in the input layer is
connected with a node in the output layer by the weight which is
represented by a matrix W with dimensions
(m×n). The first step is to compute the evidence for the
entire feature set. Note: we use bold notations to denote matrix /
vectors:
where b is a bias vector of dimension n.
In the linear_layer function, we perform two operations: 0. multiply
the weights (W) with the features (x) and add
individual features’ contribution, 1. add the bias term b.
In [13]:
def linear_layer(input_var, output_dim):
input_dim = input_var.shape[0]
weight = C.parameter(shape=(input_dim, output_dim))
bias = C.parameter(shape=(output_dim))
return bias + C.times(input_var, weight)
The next step is to convert the evidence (the output of the linear layer) through a non-linear function a.k.a. activation functions of your choice that would squash the evidence to activations using a choice of functions (found here). Sigmoid or Tanh are historically popular. We will use sigmoid function in this tutorial. The output of the sigmoid function often is the input to the next layer or the output of the final layer.
Question: Try different activation functions by passing different
them to nonlinearity value and get familiarized with using them.
In [14]:
def dense_layer(input_var, output_dim, nonlinearity):
l = linear_layer(input_var, output_dim)
return nonlinearity(l)
Now that we have created one hidden layer, we need to iterate through the layers to create a fully connected classifier. Output of the first layer h1 becomes the input to the next layer.
In this example we have only 2 layers, hence one could conceivably write the code as:
h1 = dense_layer(input_var, hidden_layer_dim, sigmoid)
h2 = dense_layer(h1, hidden_layer_dim, sigmoid)
To be more agile when experimenting with the number of layers, we prefer to write it as follows:
h = dense_layer(input_var, hidden_layer_dim, sigmoid)
for i in range(1, num_hidden_layers):
h = dense_layer(h, hidden_layer_dim, sigmoid)
In [15]:
# Define a multilayer feedforward classification model
def fully_connected_classifier_net(input_var, num_output_classes, hidden_layer_dim,
num_hidden_layers, nonlinearity):
h = dense_layer(input_var, hidden_layer_dim, nonlinearity)
for i in range(1, num_hidden_layers):
h = dense_layer(h, hidden_layer_dim, nonlinearity)
return linear_layer(h, num_output_classes)
The network output z will be used to represent the output of a
network across.
In [16]:
# Create the fully connected classfier
z = fully_connected_classifier_net(input, num_output_classes, hidden_layers_dim,
num_hidden_layers, C.sigmoid)
While the aforementioned network helps us better understand how to
implement a network using CNTK primitives, it is much more convenient
and faster to use the layers
library. It provides
predefined commonly used “layers” (lego like blocks), which simplifies
the design of networks that consist of standard layers layered on top of
each other. For instance, dense_layer is already easily accessible
through the
Dense layer
function to compose our deep model. We can pass the input variable
(input) to this model to get the network output.
Suggested task: Please go through the model defined above and the
output of the create_model function and convince yourself that the
implementation below encapsulates the code above.
In [17]:
def create_model(features):
with C.layers.default_options(init=C.layers.glorot_uniform(), activation=C.sigmoid):
h = features
for _ in range(num_hidden_layers):
h = C.layers.Dense(hidden_layers_dim)(h)
last_layer = C.layers.Dense(num_output_classes, activation = None)
return last_layer(h)
z = create_model(input)
Learning model parameters¶
Now that the network is setup, we would like to learn the parameters
W and b for each of the layers in our network.
To do so we convert, the computed evidence (zfinal layer)
into a set of predicted probabilities (p) using a
softmax function.
One can see the softmax function as an activation function that maps
the accumulated evidences to a probability distribution over the classes
(Details of the softmax
function).
Other choices of activation function can be found
here.
Training¶
If you have already gone through CNTK101, please skip this section and jump to the section titled, Run the trainer’.
The output of the softmax is a probability of observations belonging
to the respective classes. For training the classifier, we need to
determine what behavior the model needs to mimic. In other words, we
want the generated probabilities to be as close as possible to the
observed labels. This function is called the cost or loss function
and shows what is the difference between the learnt model vs. that
generated by the training set.
where p is our predicted probability from softmax function
and y represents the label. This label provided with the data
for training is also called the ground-truth label. In the two-class
example, the label variable has dimensions of two (equal to the
num_output_classes or C). Generally speaking, if the task in
hand requires classification into C different classes, the label
variable will have C elements with 0 everywhere except for the
class represented by the data point where it will be 1. Understanding
the
details
of this cross-entropy function is highly recommended.
In [18]:
loss = C.cross_entropy_with_softmax(z, label)
Evaluation¶
In order to evaluate the classification, one can compare the output of
the network which for each observation emits a vector of evidences (can
be converted into probabilities using softmax functions) with
dimension equal to number of classes.
In [19]:
eval_error = C.classification_error(z, label)
Configure training¶
The trainer strives to reduce the loss function by different
optimization approaches, Stochastic Gradient
Descent
(sgd) being one of the most popular one. Typically, one would start
with random initialization of the model parameters. The sgd
optimizer would calculate the loss or error between the predicted
label against the corresponding ground-truth label and using
gradient-descent
generate a new set model parameters in a single iteration.
The aforementioned model parameter update using a single observation at
a time is attractive since it does not require the entire data set (all
observation) to be loaded in memory and also requires gradient
computation over fewer datapoints, thus allowing for training on large
data sets. However, the updates generated using a single observation
sample at a time can vary wildly between iterations. An intermediate
ground is to load a small set of observations and use an average of the
loss or error from that set to update the model parameters. This
subset is called a minibatch.
With minibatches we often sample observation from the larger training
dataset. We repeat the process of model parameters update using
different combination of training samples and over a period of time
minimize the loss (and the error). When the incremental error rates
are no longer changing significantly or after a preset number of maximum
minibatches to train, we claim that our model is trained.
One of the key parameter for
optimization
is called the learning_rate. For now, we can think of it as a
scaling factor that modulates how much we change the parameters in any
iteration. We will be covering more details in later tutorial. With this
information, we are ready to create our trainer.
In [20]:
# Instantiate the trainer object to drive the model training
learning_rate = 0.5
lr_schedule = C.learning_parameter_schedule(learning_rate)
learner = C.sgd(z.parameters, lr_schedule)
trainer = C.Trainer(z, (loss, eval_error), [learner])
First lets create some helper functions that will be needed to visualize different functions associated with training.
In [21]:
# Define a utility function to compute the moving average sum.
# A more efficient implementation is possible with np.cumsum() function
def moving_average(a, w=10):
if len(a) < w:
return a[:] # Need to send a copy of the array
return [val if idx < w else sum(a[(idx-w):idx])/w for idx, val in enumerate(a)]
# Defines a utility that prints the training progress
def print_training_progress(trainer, mb, frequency, verbose=1):
training_loss = "NA"
eval_error = "NA"
if mb%frequency == 0:
training_loss = trainer.previous_minibatch_loss_average
eval_error = trainer.previous_minibatch_evaluation_average
if verbose:
print ("Minibatch: {}, Train Loss: {}, Train Error: {}".format(mb, training_loss, eval_error))
return mb, training_loss, eval_error
Run the trainer¶
We are now ready to train our fully connected neural net. We want to decide what data we need to feed into the training engine.
In this example, each iteration of the optimizer will work on 25 samples
(25 dots w.r.t. the plot above) a.k.a. minibatch_size. We would like
to train on say 20000 observations. Note: In real world case, we would
be given a certain amount of labeled data (in the context of this
example, observation (age, size) and what they mean (benign /
malignant)). We would use a large number of observations for training
say 70% and set aside the remainder for evaluation of the trained model.
With these parameters we can proceed with training our simple feed forward network.
In [22]:
# Initialize the parameters for the trainer
minibatch_size = 25
num_samples = 20000
num_minibatches_to_train = num_samples / minibatch_size
In [23]:
# Run the trainer and perform model training
training_progress_output_freq = 20
plotdata = {"batchsize":[], "loss":[], "error":[]}
for i in range(0, int(num_minibatches_to_train)):
features, labels = generate_random_data_sample(minibatch_size, input_dim, num_output_classes)
# Specify the input variables mapping in the model to actual minibatch data for training
trainer.train_minibatch({input : features, label : labels})
batchsize, loss, error = print_training_progress(trainer, i,
training_progress_output_freq, verbose=0)
if not (loss == "NA" or error =="NA"):
plotdata["batchsize"].append(batchsize)
plotdata["loss"].append(loss)
plotdata["error"].append(error)
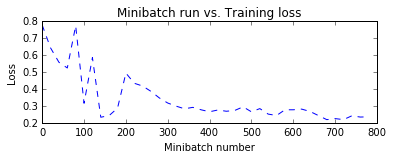
Let us plot the errors over the different training minibatches. Note that as we iterate the training loss decreases though we do see some intermediate bumps. The bumps indicate that during that iteration the model came across observations that it predicted incorrectly. This can happen with observations that are novel during model training.
One way to smoothen the bumps is by increasing the minibatch size. One could conceptually use the entire data set in every iteration. This would ensure the loss keeps consistently decreasing over iterations. However, this approach requires the gradient computations over all data points in the dataset and repeat those after locally updating the model parameters for a large number of iterations. For this toy example it is not a big deal. However with real world example, making multiple passes over the entire data set for each iteration of parameter update becomes computationally prohibitive.
Hence, we use smaller minibatches and using sgd enables us to have a
great scalability while being performant for large data sets. There are
advanced variants of the optimizer unique to CNTK that enable harnessing
computational efficiency for real world data sets and will be introduced
in advanced tutorials.
In [24]:
# Compute the moving average loss to smooth out the noise in SGD
plotdata["avgloss"] = moving_average(plotdata["loss"])
plotdata["avgerror"] = moving_average(plotdata["error"])
# Plot the training loss and the training error
import matplotlib.pyplot as plt
plt.figure(1)
plt.subplot(211)
plt.plot(plotdata["batchsize"], plotdata["avgloss"], 'b--')
plt.xlabel('Minibatch number')
plt.ylabel('Loss')
plt.title('Minibatch run vs. Training loss')
plt.show()
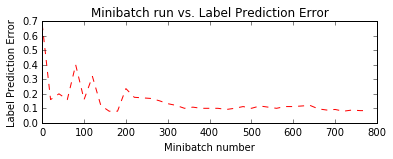
plt.subplot(212)
plt.plot(plotdata["batchsize"], plotdata["avgerror"], 'r--')
plt.xlabel('Minibatch number')
plt.ylabel('Label Prediction Error')
plt.title('Minibatch run vs. Label Prediction Error')
plt.show()
Run evaluation / testing¶
Now that we have trained the network, let us evaluate the trained
network on data that hasn’t been used for training. This is often called
testing. Let us create some new data set and evaluate the average
error and loss on this set. This is done using
trainer.test_minibatch.
In [25]:
# Generate new data
test_minibatch_size = 25
features, labels = generate_random_data_sample(test_minibatch_size, input_dim, num_output_classes)
trainer.test_minibatch({input : features, label : labels})
Out[25]:
0.12
Note, this error is very comparable to our training error indicating that our model has good “out of sample” error a.k.a. generalization error. This implies that our model can very effectively deal with previously unseen observations (during the training process). This is key to avoid the phenomenon of overfitting.
We have so far been dealing with aggregate measures of error. Lets now
get the probabilities associated with individual data points. For each
observation, the eval function returns the probability distribution
across all the classes. If you used the default parameters in this
tutorial, then it would be a vector of 2 elements per observation. First
let us route the network output through a softmax function.
Why do we need to route the network output ``netout`` via ``softmax``?
The way we have configured the network includes the output of all the activation nodes (e.g., the green layer in Figure 4). The output nodes (the orange layer in Figure 4), converts the activations into a probability. A simple and effective way is to route the activations via a softmax function.
In [26]:
# Figure 4
Image(url="http://cntk.ai/jup/feedforward_network.jpg", width=200, height=200)
Out[26]:
In [27]:
out = C.softmax(z)
Let us test on previously unseen data.
In [28]:
predicted_label_probs = out.eval({input : features})
In [29]:
print("Label :", [np.argmax(label) for label in labels])
print("Predicted:", [np.argmax(row) for row in predicted_label_probs])
Label : [1, 0, 0, 1, 1, 1, 0, 1, 1, 0, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 1, 0, 0, 0, 1]
Predicted: [1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 1, 1, 1, 0, 1, 0, 1, 1, 0, 0, 1, 0, 0, 0, 1]
Exploration Suggestion - Try exploring how the classifier behaves
with different data distributions, e.g. changing the minibatch_size
parameter from 25 to say 64. What happens to the error rate? How does
the error compare to the logistic regression classifier? - Try exploring
different optimizers such as Adam (fsadagrad). learner =
fsadagrad(z.parameters(), 0.02, 0, targetAdagradAvDenom=1) - Can you
change the network to reduce the training error rate? When do you see
overfitting happening?
Code link
If you want to try running the tutorial from python command prompt. Please run the FeedForwardNet.py example.